




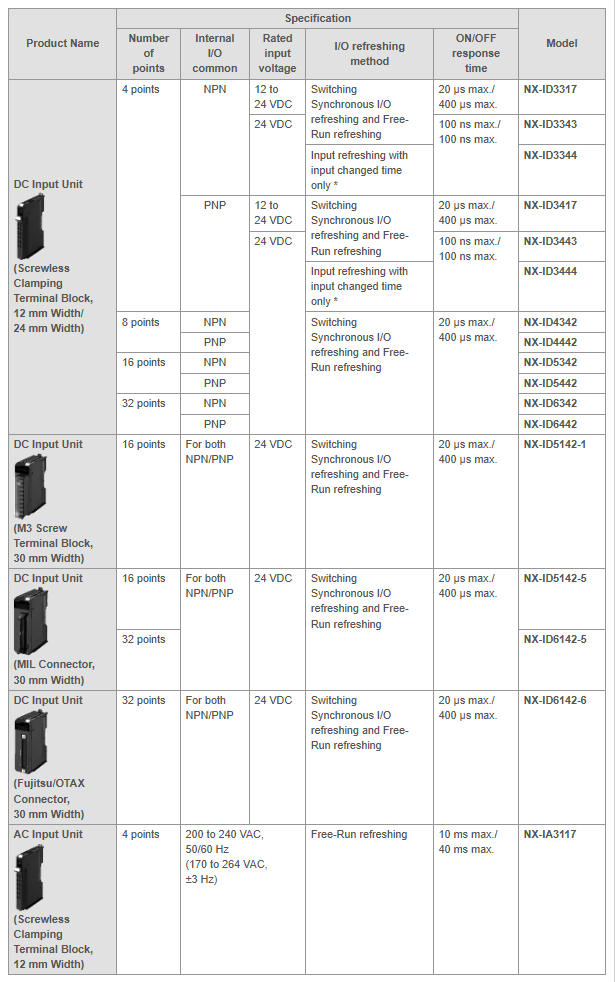
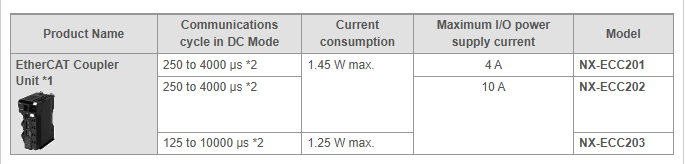
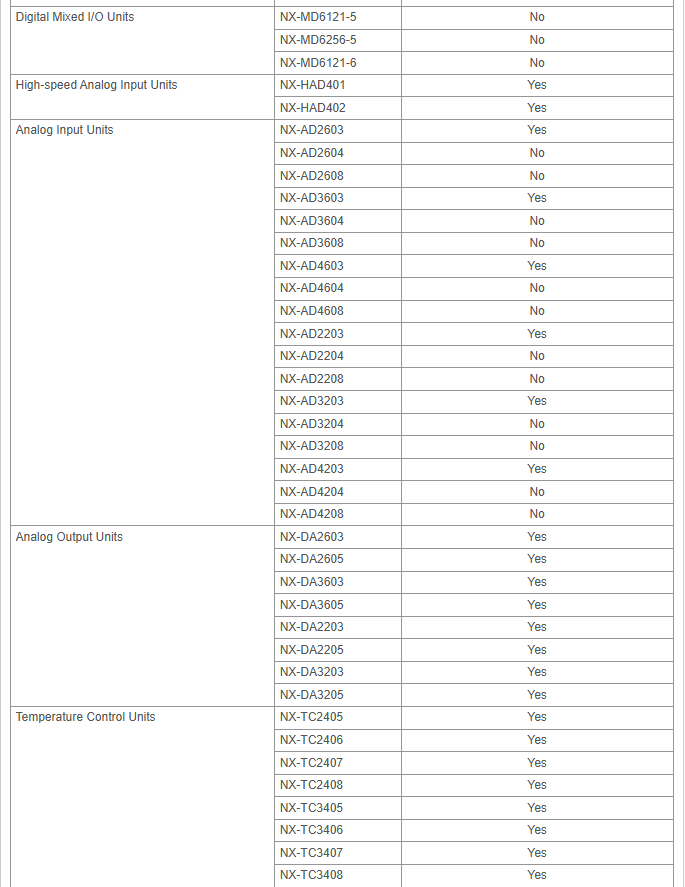
* To use input refreshing with input changed time, the EtherCAT Coupler Unit with unit version 1.1 or later and the Sysmac Studio version 1.07 or higher are required.


Loading....

At Ladder Logix, we are driven by innovation and committed to excellence in industrial automation.